%20--%3e%3csvg%20version='1.1'%20id='图层_1'%20xmlns='http://www.w3.org/2000/svg'%20xmlns:xlink='http://www.w3.org/1999/xlink'%20x='0px'%20y='0px'%20viewBox='0%200%20289.2%2071.5'%20style='enable-background:new%200%200%20289.2%2071.5;'%20xml:space='preserve'%3e%3cstyle%20type='text/css'%3e%20.st0{fill-rule:evenodd;clip-rule:evenodd;fill:%23B81C22;}%20.st1{fill:%23B81C22;}%20%3c/style%3e%3cg%3e%3cpath%20class='st0'%20d='M286.5,2.7c-0.2-0.5-0.7-1-1.6-1c-4.1,0-9.1,0-9.1,0c-2.9,0-6.1,3.1-6.1,3.1c0,0-13,14.6-21.8,23.4l-1,1%20l2.3-18.7c0.3-2.2-0.4-4.5-1.9-6.1c-1.5-1.7-3.6-2.7-5.9-2.7h-2.8c-1,0-1.8,0.7-1.9,1.7l-8.3,65.1c-0.1,0.5,0.1,1.1,0.5,1.5%20c0.4,0.4,0.9,0.7,1.4,0.7h3c4.8,0,8.8-3.5,9.4-8.3l1.8-14.2l6.6-6.6l0.3,0.5c3.5,5.3,16.2,24.4,16.9,25.6c0.4,0.4,1.9,3.1,6.2,3.1%20l8.6-0.1c0.8,0,1.4-0.4,1.7-1.1c0.3-0.7,0.3-1.4-0.1-2.1l-22.1-32.5c-1.2-1.7-1-4,0.5-5.5l23.1-24.8C286.7,3.9,286.7,3.2,286.5,2.7%20'/%3e%3cpath%20class='st0'%20d='M174.4,14.3C174.4,14.3,174.4,14.2,174.4,14.3L176,4c0.1-0.7-0.1-1.3-0.5-1.8c-0.4-0.5-1.1-0.8-1.8-0.8h-50.4%20c-1.5,0-3,1.2-3.2,2.7l-1.3,10.2h21.1l-7.1,56.2l13.1,0c0.1,0,0.1-0.1,0.1-0.1l7.4-56.2H174.4z'/%3e%3cpath%20class='st0'%20d='M13,1.4h-2.6c-0.9,0-1.8,0.8-1.9,1.7L0.8,64.4c-0.2,1.6,0.2,3,1.2,4.1c1,1.1,2.5,1.8,4.1,1.8h39.7%20c1.3,0,2.4-1,2.6-2.3c0.4-3-0.4-5.8-2.3-7.9c-1.9-2.1-4.6-3.3-7.6-3.3H23.7c-1.6,0-3.1-0.7-4.1-1.9c-1.1-1.2-1.5-2.8-1.3-4.3%20L23,12.7c0.4-3-0.4-5.8-2.3-8C18.8,2.6,16.1,1.4,13,1.4'/%3e%3cpath%20class='st0'%20d='M223,40.3c0.3,0,0.5-0.2,0.6-0.5l1.1-8.4c0-0.1,0-0.2-0.1-0.3c-0.1-0.1-0.1-0.1-0.3-0.1h-8%20c-0.3,0-0.5,0.2-0.6,0.5l-1.1,8.4c0,0.1,0,0.2,0.1,0.3c0.1,0.1,0.1,0.1,0.3,0.1H223z'/%3e%3cpath%20class='st0'%20d='M229,1.4h-35.4c-6.9,0-13.1,5.5-14,12.3L174,58c-0.4,3.3,0.5,6.4,2.6,8.7c2,2.3,4.9,3.6,8.2,3.6h35.8l0.5-5%20c0.2-2.1-0.5-4.1-1.9-5.7c-1.4-1.5-3.4-2.4-5.5-2.4l-17.2,0c-2.2,0-4.2-0.9-5.6-2.5c-1.4-1.6-2-3.7-1.8-6c0.6-4.5,4.7-8.3,9.3-8.3%20l11.5,0c0.3,0,0.6-0.2,0.6-0.5l1-8.3c0-0.1,0-0.2-0.1-0.3c-0.1-0.1-0.2-0.1-0.3-0.1l-11.6,0h0c-3.2,0-5.5-1.3-6.6-3.6%20c-1.3-2.8-1.1-6,0.6-8.6c1.8-2.8,4.8-4.5,8-4.5h18.1c4.5,0,8.3-3.3,8.8-7.8L229,1.4z'/%3e%3cpath%20class='st1'%20d='M112.3,9.9c-1.5-2.9-3.8-5.1-7-6.5c-3.1-1.4-7.4-2.1-12.8-2.1l-25.4,0h0c-2.5,0-4.8,2-5.1,4.5l-7.3,57.9%20c-0.2,1.8,0.3,3.4,1.4,4.7c1.1,1.3,2.7,1.9,4.5,1.9h23.5c4.5,0,8.4-0.4,11.6-1.2c3.2-0.8,6-1.9,8.3-3.5c2.3-1.5,4.4-3.8,6.2-6.6%20c1.8-2.8,2.9-5.9,3.3-9.1c0.5-4.1-0.2-7.6-2.2-10.6c-1.6-2.4-3.9-4.3-7-5.6l-0.9-0.4l0.9-0.5c2.5-1.4,4.6-3.2,6.1-5.3%20c2-2.7,3.2-5.5,3.6-8.5C114.4,15.9,113.8,12.8,112.3,9.9%20M101.5,21.7c-0.5,4-4,7.1-7.9,7.2H78.4l-0.2,1.3c-0.3,2.7,0.4,5.2,2.1,7.1%20c1.7,1.9,4.1,2.9,6.8,2.9h3.4c0.6,0,1.2,0.1,1.7,0.2c0.3,0,0.6,0.1,0.8,0.2l0,0.5l0.1-0.5c3.5,1.1,5.5,4.4,5.1,8.2%20c-0.6,4.6-4.8,8.4-9.5,8.4H71.4c-0.6,0-1.2-0.3-1.6-0.7c-0.4-0.5-0.6-1-0.5-1.6l4.9-38.6c0.1-1.1,1-1.8,2.1-1.8h0%20c15.3,0,18.2,0,18.8,0l0,0c1.9,0,3.7,0.8,4.9,2.1C101.2,17.9,101.7,19.7,101.5,21.7'/%3e%3c/g%3e%3c/svg%3e)
在计算光学成像领域,如何高效提取图像边缘特征并实现动态场景的高速捕捉一直是研究热点。近日,北京航空航天大学王帆团队联合国内外研究机构在Optics Letters发表研究,提出了一种基于无透镜散射相机的时间压缩边缘成像方法(Diffuser-eCam),首次实现了从单次2D散斑测量中直接重建移动物体的边缘图像序列,为动态场景的实时边缘检测提供了新范式。该技术绕开传统方法中“先重建原始图像——再后处理”的流程,通过光学编码与算法优化的深度结合,在提升边缘成像质量的同时,实现了帧率的数十倍提升。
传统无透镜成像的痛点-边缘检测的流程瓶颈
无透镜成像技术凭借小型化、低成本的优势,已在3D深度成像、光谱成像等领域展现潜力。其核心原理是利用调制器对光场的调制作用,将物体信息编码,再通过算法重建原始图像。然而,当涉及边缘检测等高级视觉任务时,传统流程存在显著缺陷:需先重建完整图像,再通过滤波算子(如Sobel、Canny)提取边缘,这不仅增加计算量,还会因中间重建步骤引入噪声累积,尤其在动态场景中难以保证时间分辨率。
关键挑战:边缘信息本质上是图像的高频特征,传统方法将其作为原始图像的“后处理结果”,忽略了边缘本身的稀疏性优势。若能直接从原始数据中提取边缘,不仅可简化流程,还能利用稀疏重建算法提升信噪比。
技术核心-嵌入边缘算子的无透镜边缘成像新框架
1. 光学系统设计与时间编码
Diffuser-eCam采用无透镜架构,核心元件为随机散射片与CMOS传感器。系统利用散射的“光学记忆效应”——当物体位于记忆效应区域内时,点扩散函数(PSF)的形状不变,仅发生空间平移,这为统一建模提供了前提。
时间压缩的关键:传感器工作在“卷帘快门”模式,不同行像素按顺序在不同时刻曝光。这种设计将时间维度的动态信息“折叠”到空间维度的像素行中,使得单次2D测量可记录物体在不同时刻的状态。例如,传感器的第r行像素对应物体在t时刻的投影,通过行数据与时间的映射关系,实现“单次测量=多帧时间序列”的编码。
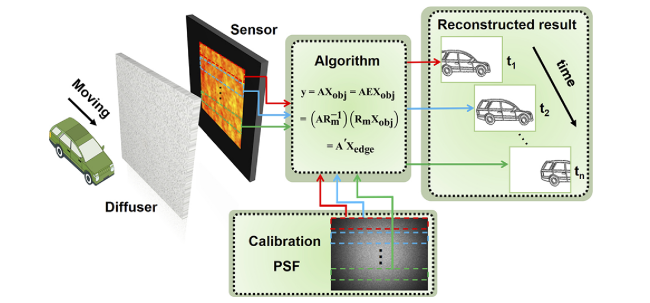
图1 Diffuser-eCam的原理
2. 算法创新:边缘算子嵌入正向模型
传统成像模型为y=AXobj(y为测量值,A前向模型矩阵,Xobj为原始图像)。新方法引入边缘检测算子R(如3×3差分矩阵),通过矩阵变换将模型改写为:y=A′Xedge,其中A′=ARm−1,其中Rm为算子R的矩阵形式,Xedge为边缘图像。进而可以通过压缩感知算法(如TwIST)可直接从y中重建边缘,无需经过Xobj重建步骤,避免了中间环节的误差累积。
核心优势:边缘在一般变换域(如小波域)具有比原始物体更高的稀疏性,直接重建边缘图像可利用这一特性提升抗噪能力。理论分析表明,当边缘稀疏度高于原始图像时,该方法的信噪比增益可达3-5 dB。
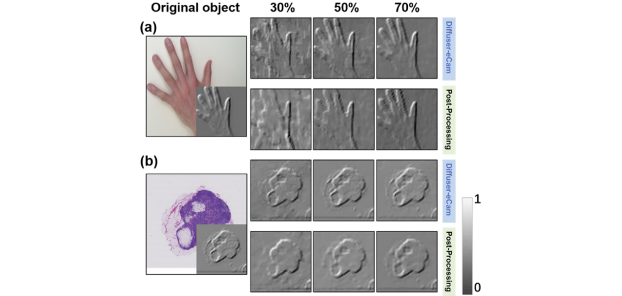
图2 使用Diffuser-eCam和“传统后处理方法”在采样率30%、50%和70%时的边缘检测模拟结果
实验验证-静态与动态场景的性能突破
1.静态边缘检测:质量与效率双提升
研究团队对“手掌”、“肿瘤组织”等图像进行模拟与实验验证,对比Diffuser-eCam与传统“重建+后处理”方法。结果显示:当采样率为50%时,Diffuser-eCam重建的边缘图像背景噪声更低,细节保留更完整(如手掌纹路、肿瘤边界)。
量化指标:峰值信噪比(PSNR):Diffuser-eCam比传统方法高3-5 dB,表明噪声水平显著降低;信息熵(IE):IE值提升10%-15%,说明边缘信息丰富度更高。
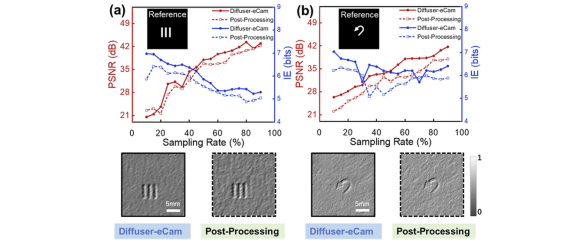
图3 使用Diffuser-eCam和“传统后处理方法”在采样率为50%时对于真实物体边缘检测实验结果
2. 动态场景重建:时间分辨率的突破
以3D打印“汽车”模型为动态对象,系统通过滚动快门模式单次测量,直接重建出36帧边缘图像序列,等效帧率达588 fps,而传感器实际帧率仅14 fps。相比之下,传统透镜系统在相同条件下因滚动快门效应导致图像严重扭曲,边缘检测结果失真。
技术亮点:通过行像素与时间的映射算法,Diffuser-eCam实现了“空间-时间”维度的解耦,使低速传感器具备高速动态捕捉能力,这对生物细胞运动监测、高速摄像等场景具有重要价值。
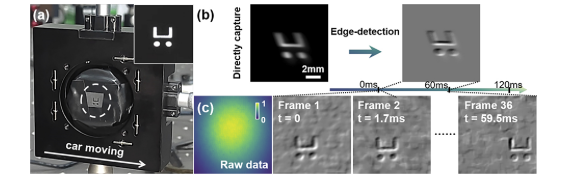
图4 Diffuser-eCam从单张二维原始数据中重建运动物体多帧边缘图像的实验演示
与之对比,直接拍摄并重建的结果会出现扭曲
总结与展望
这项研究的核心价值在于打破了“成像=先复原再处理”的固有思维,通过光学与算法的协同设计,将边缘检测这一核心视觉任务嵌入成像流程的最前端,其展现的“任务导向型”成像理念,为计算光学领域提供了可落地的创新范式。团队计划将波长编码、偏振分析等功能融入Diffuser-eCam,构建“边缘+光谱+偏振”的多维成像系统。同时,结合深度学习优化重建算法,提升复杂场景下的抗噪能力与重建速度。
本文作者
郑泽 上海交通大学(电子信息与电气工程学院)
参考文献
[1] Ze Zheng, Baolei Liu, Jiaqi Song, Lei Ding, Xiaolan Zhong, Lingqian Chang, Xiaojun Wu, David McGloin, and Fan Wang, "Temporal compressive edge imaging enabled by a lensless diffuser camera," Opt. Lett. 49, 3058-3061 (2024).




